Path Planning Team
Meet the Team





What We Do
We are responsible for planning the drone's movements and actions when searching a farm for deer and when deterring deer once they are detected.
Searching for deer
We frame the deer searching problem as an energy-efficient coverage path planning problem. Given a farm that we wish to surveil, we evenly distribute waypoints across the farm so that if a drone travels through all of the waypoints, then the entire area has been searched.
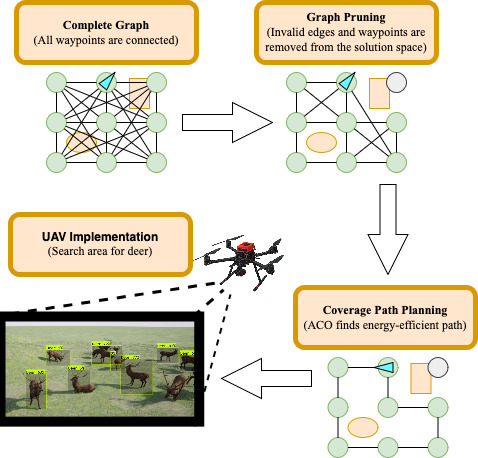
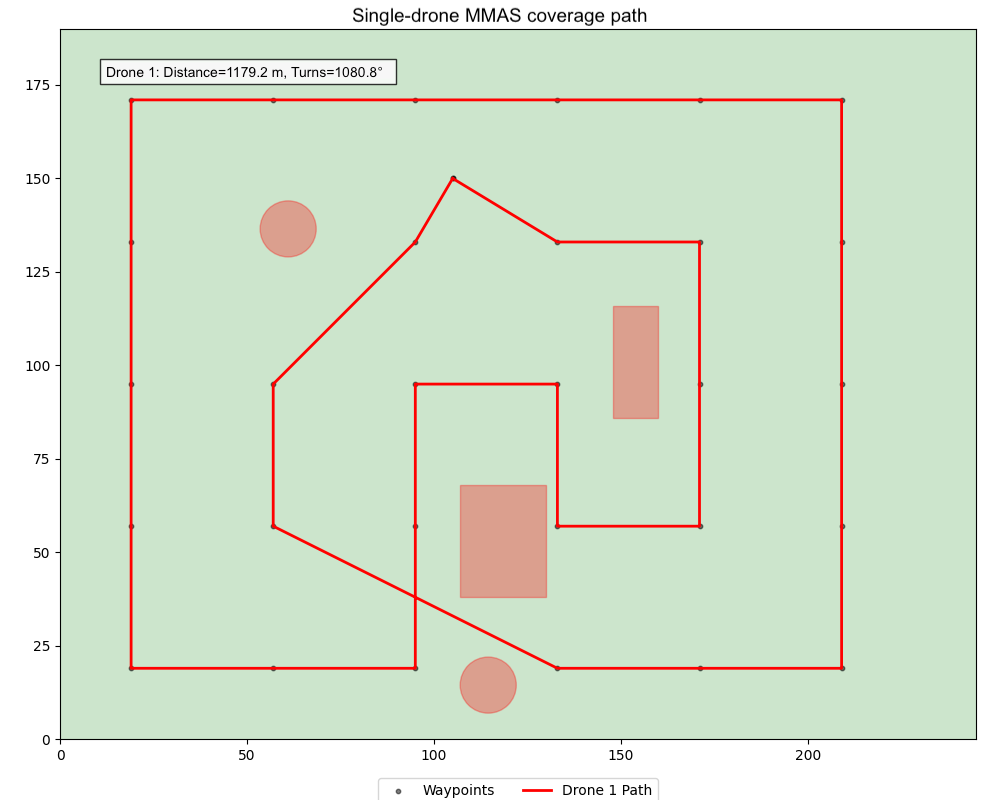
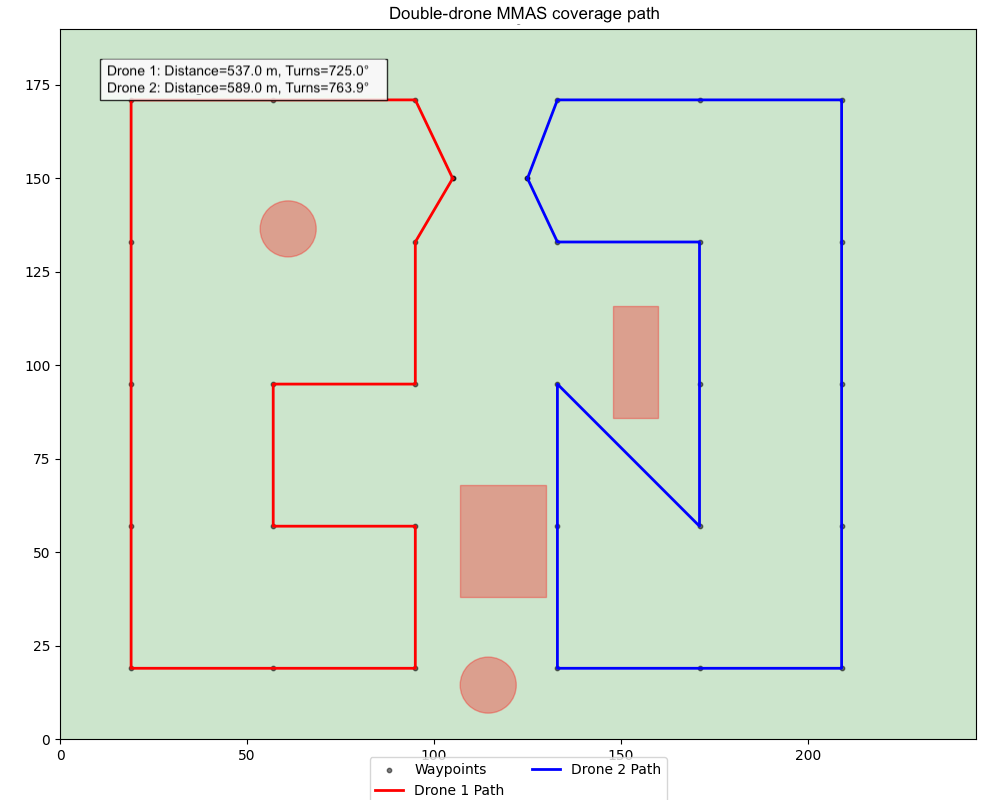
For each drone, we use Ant Colony Optimization (ACO) to generate energy-efficient flight path from its charging station, through all waypoints that aren't too close to obstacles such as trees or buildings, and back to its charging station. We approximate the energy cost of a flight path by considering the distance and rotations required for a drone to execute the path. We constrain the flight paths of drones to travel along edges in straight lines. So, in order to ensure obstacle avoidance, we simply remove any edges that cross or come close to obstacles.
Here are example paths that we generated with ACO that avoid obstacles!
If you're interested in learning the details of our implementation, please get in touch with us!
